2026-04-13 17:39:43
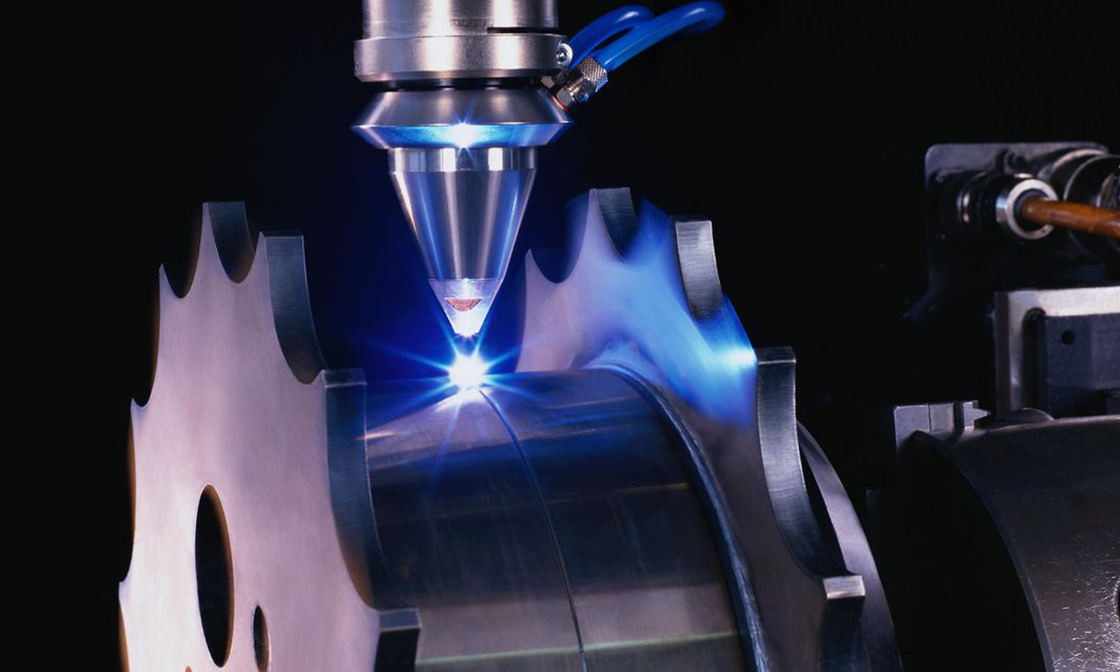
医疗植入式器件壳体(钛合金、不锈钢)的复杂曲面密封焊接,需要焊接头或工件工作台加装旋转轴(A轴、B轴、C轴),形成4轴或5轴联动运动控制系统。设备通过在X、Y、Z三轴直线运动的基础上增加1至2个旋转轴,并集成RTCP(刀尖跟随)算法与PSO(位置同步输出)功能,可实现空间任意曲面的等速、等间距焊接,确保焊缝一致性。典型性能指标:旋转轴重复定位精度≤±0.005mm(≤5角秒),直线轴重复精度≤±0.005mm,空间轨迹精度可达微米级,完全满足植入式医疗器械壳体氦漏率≤1×10⁻⁹ atm·cc/s的气密性要求。
精密激光焊接设备实现复杂曲面焊接的核心是多轴联动运动系统。系统在标准XYZ三轴直线平台基础上,增加A轴(绕X轴旋转)、B轴(绕Y轴旋转)和C轴(绕Z轴旋转)中的1至2个旋转轴,形成4轴或5轴加工能力。
XYZ三轴直线运动平台:承载焊接头或工件工作台在X、Y、Z三个直线方向运动,典型行程为300mm×300mm×200mm至500mm×500mm×300mm,直线轴重复定位精度可达≤±0.005mm,最大移动速度≥500mm/s,为精密焊接提供基础平面覆盖能力。
A轴旋转机构:焊接头或工件绕X轴旋转,实现工件上下表面的倾斜角度调整。专利方案中A轴通常由伺服电机+高精度减速机驱动,可实现360°连续旋转,使焊接头能够适应工件非水平面的焊接需求。
B轴摆动机构:焊接头或工件绕Y轴摆动,与A轴配合可实现焊接头姿态的万向调整。典型结构为U形支架承载焊接头,由伺服电机驱动实现±90°至±135°的摆动范围,使激光束始终保持与工件表面法线方向的入射角要求。
C轴回转轴:工件绕Z轴旋转,适用于圆柱形、环形或对称工件的周向连续焊接。模块化C轴旋转单元通常集成气动或电动夹头,可承载3-50kg工件,转速0.5-30rpm,定位精度±0.05°,重复定位精度±0.02°。可实现360°连续旋转焊接,适合支架、导管、圆柱形壳体等长条形或管状医疗器械的密封焊接。
上述各轴的驱动与控制由高性能CNC控制器或运动控制卡统一协调,支持脉冲式或总线式伺服驱动,可实现最多18轴协同运动,满足从三轴焊接机到五轴焊接机的全面配置需求。
多轴联动焊接中,当增加旋转轴(A/B/C轴)后,激光焦点的空间位置会随工件姿态变化而产生偏移。例如,当C轴旋转90°时,激光焦点可能偏离原焊缝轨迹数毫米,导致焊接精度丧失。为解决这一问题,RTCP(Rotational Tool Center Point,旋转刀具中心点)算法(也称为刀尖跟随功能)成为多轴激光焊接系统的必备核心技术。
RTCP的核心作用是:在运动控制系统内部建立工件坐标系与机床坐标系之间的实时变换矩阵。无论A、B、C轴如何旋转或摆动,RTCP算法自动补偿各旋转轴的转动引起的焦点位置偏移,确保激光焦点的空间位置和入射角度始终保持在理想值。具体表现为:
RTCP功能的实现依赖于五轴运动学建模(坐标转换矩阵)和高实时性的插补算法,属于高端CNC控制系统的核心能力。医疗焊接设备需将RTCP功能作为标准配置或可选升级项,以满足复杂曲面壳体的焊接要求。
对于采用脉冲激光器(如脉冲YAG或脉冲光纤激光器)的焊接工艺,激光出光脉冲与运动轨迹的同步精度直接影响焊缝质量和气密性。多轴焊接系统需集成PSO(Position Synchronized Output,位置同步输出)或PBF(Position Based Firing,基于位置的脉冲触发)技术。
传统方案中,脉冲触发通常基于时间间隔(例如每隔10毫秒发射一个脉冲),当运动速度波动时,相邻焊点间距会不均匀,导致在尖角或弧段焊点过密(热输入过高)或过疏(焊缝不连续)。PSO技术则实现:脉冲触发基于运动轨迹的实际位移,无论速度如何变化,焊点之间的物理间距保持恒定(例如每0.05mm发射一个脉冲)。该技术在钛合金壳体尖角焊接中的优势尤为明显:当焊接轨迹经过尖角时,运动速度可能降低,但PSO确保焊点间距仍为设定值,保证热输入均匀,避免因热集中导致裂纹或过熔。
典型PSO参数要求:脉冲间距分辨率≥0.001mm,支持直线、圆弧、样条曲线等多种轨迹类型,与4轴或5轴运动控制系统无缝集成。
为帮助用户根据自身产品特征选择合适的运动轴配置,下表对比了三轴与五轴激光焊接系统在适用场景、技术能力和精度方面的差异:
对比维度三轴激光焊接系统四轴/五轴激光焊接系统 适用工件形状平面工件、简单二维轮廓、平板类壳体复杂三维曲面、异形壳体、圆柱/圆锥形、带倒角或倾斜面工件 加工能力仅能加工与激光头垂直的平面,无法加工倾斜面或侧面工件一次装夹可完成五个面的加工,实现无死角焊接 焊缝一致性弧面或斜面焊接时出现边缘虚焦、熔深不均RTCP功能确保焦点始终与工件表面垂直或保持恒定离焦量 复杂曲面无法焊接三维空间曲线,只能投影到平面后焊接支持空间曲线插补和空间圆弧运动,实现3D轨迹精确跟随 重复定位精度直线轴≤±0.01mm直线轴≤±0.005mm,旋转轴≤±0.005mm(≤5角秒) 典型应用平面盖板密封焊接、方形壳体、简单矩形焊缝心脏起搏器壳体(带倒角)、人工耳蜗钛合金外壳、植入式传感器异形壳体
在精密医疗器械焊接场景中,植入式医疗器件的外壳几何形状正变得越来越复杂,传统三轴焊接系统在面临微小倒角、三维高低起伏边缘与极薄金属管壁时已无法满足气密性要求。因此,4轴或5轴配置已成为高可靠性植入器件焊接的主流选择。
金密激光提供从3轴至5轴的激光焊接运动控制系统定制方案,可灵活配置A轴(旋转)、B轴(摆动)、C轴(回转)以及工件双转台结构或焊接头摇摆结构等多种构型,适配不同产品的空间焊接需求。系统特性包括:
在设备验收阶段,可通过以下方法验证多轴焊接系统的精度和功能:
如需根据您产品的三维模型评估多轴焊接可行性、获取RTCP测试报告或空间焊接工艺参数,可联系金密激光获取技术评估及打样验证服务。